

Ijraset Journal For Research in Applied Science and Engineering Technology
360-Degree Radar System Using Ultrasonic Sensors and ESP32 Chip
Authors: Abhishek Vidhate , Shrawani Jangam, Sakshi Bhorde
DOI Link: https://doi.org/10.22214/ijraset.2025.66774
Certificate: View Certificate
Abstract
In this article, we outline the planning and execution of a 360-degree radar scanning system. The system is designed to scan a full 360-degree area and provide real-time data about the objects present in the scanned area. The system uses a rotating platform that can rotate in a full circle to scan the entire area. The radar system is mounted on the platform, and it scans the area continuously while the platform rotates. The system is designed to be compact and portable, making it easy to move and set up in different locations. The radar system uses a phased-array antenna to scan the area in a circular pattern, providing high-resolution data about the objects present in the area. The system is also equipped with a data processing unit that analyzes the radar data and provides real-time feedback about the objects detected.
Introduction
I. INTRODUCTION
We know everything produces sound waves just by the existence and effect flow of air around them with their natural frequency. These frequencies are beyond the hearing range of humans. An ultrasonic wave is a wave with a frequency range of 20KHZ or less that may be detected by an ultrasonic sensor and used to obtain various pieces of information. An ultrasonic detector usually has a transducer that converts sound energy into electrical energy and electrical energy into sound energy. They are used to measure object orientation and positioning, as well as in collision avoidance and surveillance systems. Ultrasonic technology alleviates challenges such as linear measurement problems by allowing users to obtain non-contact measurements of the distance between an object and its surroundings.
The speed of travel of sound waves depends upon the square root of the ratio between medium density and stiffness. Also, the property of the speed of sound can also be changed by natural environmental conditions like temperature. In essence, an ultrasonic sensor emits ultrasonic waves that travel through the air and are reflected when they strike an item. By evaluating the property of the reflected wave, we can learn about an object's distance, position, and speed. Processing and arduino software is used in conjunction with the hardware system to detect the object's numerous parameters. One of the most common applications of the ultra-sonic sensor is range finding. It is also known as sonar, which is similar to radar in that ultrasonic sound is sent in a specific direction and if there is any item in its route, it impacts it and is reflected back, allowing us to calculate the distance of an object. Bats utilize this technique in the dark.
II. LITERATURE REVIEW
“Low-Cost Mini Radar: Design Prototyping and Tests”, 20 July 2017 Dario Tarchi, Michele Vespe, Ciro Gioia, Francesco Sermi, Vladimir Kyovtorov and Giorgio Guglieri. Designed a surveillance radar system. Currently, radar systems are used in many fields (e.g., automotive, aerospace, geoscience, and medicine fields) and for multiple applications. Particularly in the maritime domain, where this task can be accomplished by utilizing a variety of resources and technologies, radars have emerged as a fundamental tool for surveillance.
“Ultrasonic Radar System”, March 2022 Diya Pawar, Prerana Petare, Sarla Gunjal, Shraddha Sarwar, Kalyani Bhawar, Prof. Changan G. S. The research's scope was limited, as demonstrated by the paper's design of a short-range radar. This system can only detect objects in this range (0 to 180 degrees) because the servo motor we used can only rotate in this range. This limitation prevents the design from being used for obstacle detection in larger spaces or areas. If a servo motor with a 360-degree rotation is used, the system might work better. We modify this system and add a longer-range ultrasonic sensor, a fully 360-degree rotating servo. hope to improve our study.
“ULTRASONIC RADAR NAVIGATION BY USING ULTRASONIC SENSOR”, July 2017 Dhanlakshmi C. Hedgire, S. S. Killarikar This work provides precise target object detections and authentications. The ultrasonic radar model detects the precise target object, and the RC4 method is utilized to evaluate if the observed object is friendly or hostile. The RC4 algorithm is simpler, quicker, and also offers more security. The transmitter and receiver are the two primary components of the radar in this essay. For wireless communication between the transmitter and receiver, an IR transceiver is employed. The VB program on the PC continuously scans the environment and tracks the position of obstacles. It provides an image of the approaching item. However, image processing takes a long time for quick object detection and is challenging in bad weather, therefore this method is especially helpful in the nighttime, bad weather, or smoky combat environments where the human eye is unable to recognize the approaching item.
III. PROPOSED SYSTEM
The goal of this project is to design and implement a 360° radar system using ultrasonic sensors integrated with an ESP32 chip for real-time object detection and distance measurement in all directions. This system can be useful for applications such as obstacle detection in robotics, security systems, or autonomous vehicles.
A. System Overview
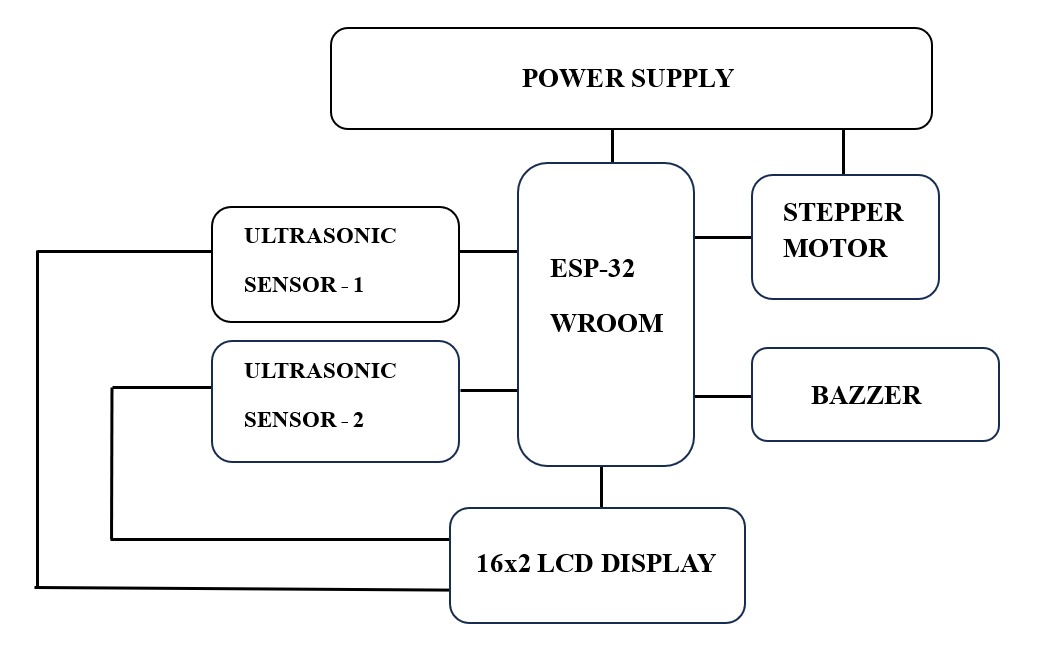
The radar system will consist of:
- Multiple Ultrasonic Sensors: These will be arranged in a circular pattern to cover 360° of the surrounding area.
- ESP32 Microcontroller: This will be the central processing unit, responsible for controlling the sensors, processing data, and communication.
- Motor for Rotating the Sensors: A motor will be used to rotate the ultrasonic sensor array, allowing the system to scan in all directions.
- Display/Interface: A graphical interface will display the results, either on an OLED screen, a web interface, or via serial output.
- Components Needed
- ESP32 Development Board: A powerful microcontroller with WiFi and Bluetooth capabilities.
- Ultrasonic Sensors: Typically, HC-SR04 or similar ultrasonic distance sensors.
- Rotating Servo Motor or Stepper Motor: For rotating the sensor array to scan the environment.
- LCD Display : To show the distance measurements and objects detected.
- Power Supply: A suitable power source for the ESP32 and sensors (e.g., 5V DC).
- Wires and Connectors: For wiring the sensors and motor to the ESP32.
B. System Design
1) Sensor Arrangement and Rotation
- The ultrasonic sensors will be arranged in a circular or semi-circular pattern around the ESP32 to ensure 360° coverage.
- The motor will rotate the sensors in small increments (e.g., 10° or 15°) to scan the surroundings. The servo or stepper motor's rotation speed will determine how fast the system can scan.
- Each ultrasonic sensor will emit a sound pulse, and the time it takes for the pulse to bounce back from an object will be measured to determine the distance.
2) Sensor Data Collection and Processing
- The ESP32 will control the ultrasonic sensors in sequence. Each sensor will send a pulse and measure the time it takes for the echo to return.
- The time-of-flight (TOF) of the sound pulse will be used to calculate the distance to an object using the formula:
Distance=(Speed of Sound×Time)/2
where:
-
- Speed of Sound is typically around 343 meters per second (depending on environmental conditions).
- Time is the round-trip time taken by the sound pulse.
3) Motor Control and Scanning
- The ESP32 will control the motor (servo or stepper) to rotate the sensor array incrementally.
- After each sensor scan, the ESP32 will rotate the sensors slightly (e.g., 10°) and repeat the measurement process.
- The results will be stored in memory and processed to provide the radar output (e.g., distance at each angle).
4) Data Visualization and Output
- A real-time display system (either an OLED display or a web-based interface) will show the distance measurements in various directions.
- The display can show a simple graphical radar-like interface with a circle representing the 360° scan, and each sector will display the distance to objects at different angles.
5) Communication and Additional Features
- WiFi/Bluetooth: The ESP32 can be connected to a mobile app or computer via WiFi/Bluetooth to display the radar data in a more advanced form, allowing remote monitoring.
- Alert System: The system can also have an alert feature (e.g., a buzzer or visual indicator) if an object is detected within a specific distance, making it useful for collision avoidance or security purposes.
C. System Flow
- Initialization:
- The ESP32 initializes the ultrasonic sensors, motor, and display interface.
- Scanning:
- The motor rotates the sensor array.
- Each ultrasonic sensor emits a pulse and calculates the distance to the nearest object.
- The ESP32 stores the distance data for each sensor at a specific angle.
- Data Processing:
- The ESP32 processes the data to generate a 360° radar scan.
- It updates the display with the current distances.
- Output:
- The radar scan can be shown on an OLED screen, or the data can be transmitted to a web interface or app via WiFi or Bluetooth.
D. Challenges and Considerations
- Sensor Accuracy: Ultrasonic sensors may not be highly accurate at longer distances or in noisy environments. The sensor's resolution could be limited, and multiple sensors might be needed to cover large distances.
- Sensor Interference: Ultrasonic sensors may interfere with each other if they are placed too close together. Careful sensor placement and timing adjustments can help mitigate this.
- Motor Precision: The motor needs to rotate the sensors with a high degree of precision to ensure that the measurements correspond to the correct angles.
- Power Supply: Ensure that the power supply can handle both the ESP32 and multiple ultrasonic sensors. A stable power source is crucial for reliable operation.
E. Future Enhancements
- Integration with LIDAR: Adding LIDAR sensors for more accurate distance measurements in addition to ultrasonic sensors.
- Data Logging: Storing the radar scan data for future analysis or pattern recognition.
- AI Integration: Implementing machine learning algorithms to interpret the data and classify objects detected in the radar scan.
- Advanced Communication: Use cloud-based services for remote monitoring and control of the radar system.
Conclusion
This 360° radar system using ultrasonic sensors and the ESP32 chip offers a flexible, relatively inexpensive solution for real-time environmental scanning. While it has limitations in accuracy compared to more advanced systems, it can be a great starting point for a variety of applications such as robotics, security, and autonomous navigation. The system\'s modularity and the integration of WiFi/Bluetooth capabilities make it easy to expand and adapt to specific needs.
References
[1] “Low-Cost Mini Radar: Design Prototyping and Tests”, 20 July 2017 Dario Tarchi, Michele Vespe, Ciro Gioia, Francesco Sermi, Vladimir Kyovtorov and Giorgio Guglieri. Designed a surveillance radar system. [2] Srijan Dubey, Supragya Tiwari, Simit Roy -“ IMPLEMENTATION OF RADAR USING ULTRASONIC SENSOR” Indian J.Sci.Res. 2017 [3] M. I. Skolnik, Radar Handbook, Mc Graw Hill, New York, NY, USA, 3rd edition, 2008. [4] M. Guerriero, P. Willett, S. Coraluppi, and C. Carthel, “Radar/AIS data fusion and SAR tasking for maritime surveillance,” in Proceedings of the 11th International Conference on Information Fusion, FUSION ’08, July 2008. [5] S. Brusch, S. Lehner, T. Fritz,M. Soccorsi, A. Soloviev, and. Van Schie, “Ship surveillance with TerraSAR-X,” IEEE Transactions on Geoscience and Remote Sensing, vol. 49, no. 3, pp. 1092–1103, 2011. [6] J. M. Headrick and J. F. Thomason, “Applications of high-frequency radar,” Radio Science, vol. 33, no. 4, pp. 1045– 1054, 1998. [7] G.W. Stimson, Introduction to airborne Radar, SciTechPublishing, Inc., San Francisco, Calif, USA, 2nd edition, 1998. [8] “Euronews, An old technology revisited to save lives at sea,” 2016. [9] Object Detection and Tracking-Based Camera Calibration for Normalized Human Height Estimation, Hindawi Publishing Corporation Journal of Sensors Volume 2016, Article ID 8347841, 9 pages.
Copyright
Copyright © 2025 Abhishek Vidhate , Shrawani Jangam, Sakshi Bhorde . This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET66774
Publish Date : 2025-01-31
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online